從 WoS – RHN 開始:看穿軟體機器人研究生最常踩的三個研究坑
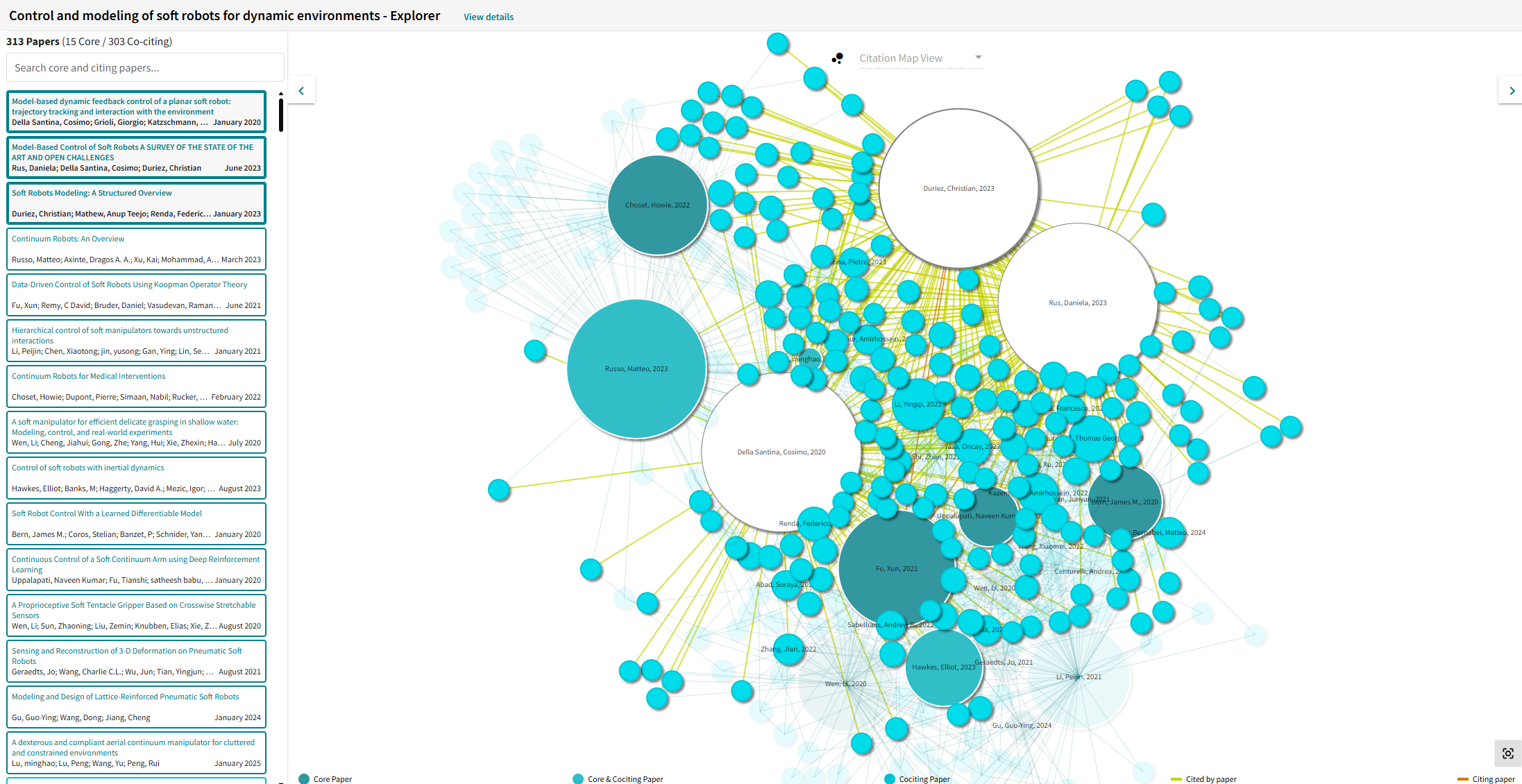
圖片來源:WoS – RHN: Control and modeling of soft robots for dynamic environments – Explorer https://tinyurl.com/3w3dn5re
以上這張圖,展示了軟體機器人動態環境控制研究中,哪些核心文獻真正撐起了整個研究社群。
如果你是剛踏進 soft robotics 或是 任一新興主題領域 的研究生,很可能在某個夜深人靜、模擬又炸掉的時刻,冒出這個念頭:
「是不是只有我,覺得這個領域每一篇 paper 都很厲害,
但沒有一篇真的教我怎麼活下來?」
放心,這不是你不夠聰明,而是你碰巧走進了一個研究界集體卡關中的新興主題。
以軟體機器人控制這個主題為例,這三個坑,幾乎是不論早晚都會一腳踩入。
差別只在於:你是掉進去一次,還是開始玩傳送門(Portal)了?
坑一:
「我想一次解決 Dynamic Environments」
典型研究生內心 OS:
「既然真實世界是動態的,那我的模型就應該一開始就考慮全部。」
這個念頭本身沒有錯,錯的是 —— 你真的相信你現在解得動它。
在 soft robotics 文獻裡,Dynamic Environments 出現的頻率,大概等同於 RPG 裡的「最終奧義」—— 大家都在用,但每個人心裡想的不是同一招。
有的時候它指的是:
- 外部擾動很多
- 環境不確定
- 接觸條件一直變
更有的時候,其實只是:
- 模型很不準
- 我也不知道接下來會發生什麼
- 所以我不敢假設環境是靜態的
換句話說,Dynamic 很多時候不是一個被嚴格定義的問題,更可能是一種研究焦慮的總稱。
👉 第一個坑就在這裡:你把「研究願景」當成了「研究問題」。
對應的那篇《Soft Robots Modeling: A Structured Overview》,其實早就偷偷告訴你一件殘酷但很重要的事:
👉 軟體機器人的建模,沒有「標準答案」。
不是你沒找到,是真的沒有。
這篇 overview 不是要你放棄模型、直接擺爛,而是在提醒你一個研究界常見、但很少說破的現實:
模型不是用來炫技的,而是用來完成任務的。
換成白話文就是 —— 你不需要每次都端出「物理全餐」,有時候「夠用就好」,反而比較能活到實驗那一關。
坑二:
「只要模型夠準,控制自然會成功」
典型研究生行為:開始瘋狂加參數、換建模方法、FEM 一路開到天亮,然後電腦風扇開始模仿直升機。
這是 soft robotics 的第二個經典幻覺:
「真實 ≈ 可控」。
但很快你就會發現一件殘酷的事:
- 模型越真,算得越慢
- 算得越慢,就越不適合即時控制
- 最後你得到一個「非常準,但永遠來不及反應」的系統,而且燒錢燒時間
👉 第二個坑:把「物理真實性」誤當成唯一價值。
如果說前一篇是在提醒你「模型別選太滿」,那這篇《Model-Based Control of Soft Robots: A Survey》幾乎就是在你肩膀上拍一拍,然後踩下煞車說一句:
「同學,先不要。」
整篇文章其實就在幫你分清楚兩種人生路線:
- 一種是 模擬派:模型要像、要細、要什麼都能解釋
- 另一種是 控制派:模型不用完美,但一定要算得完、跑得動
前者很適合拿來寫模擬圖、做漂亮動畫;後者才是能真的拿來接控制器、接感測器、接現實世界的版本。
所以這篇 survey 的潛台詞其實是:
👉 模型的工作,不是複製世界,而是抓住「真正會影響行為的那幾件事」。
其餘的細節,在控制問題裡,反而是可以被「假裝沒看到」的。
坑三:
「我要做一個完整、通用、什麼都能應付的控制器」
這一坑,通常發生在你已經被前兩坑炸過之後。
你開始想:「那我乾脆做一個比較完整的系統吧?」
於是你同時想要:
- 非線性
- 動態回饋
- 接觸控制
- 真實環境
- 還要能證明穩定性
恭喜你,你已經走到 研究生地獄的隱藏結局。
👉 第三個坑:你跳過了「可被證明的最小版本」。
再回頭看《Model-based Dynamic Feedback Control of a Planar Soft Robot》,你會發現它表面看起來好像「做得不多」,實際上卻非常老練。
他們做了三個非常研究生該學的選擇:
- 不做 3D,只做 平面版(planar)
- 不追求最真,只求 能分析
- 不談通用,只證明 一個真的跑得起來的案例
這不是縮水,更不是偷工減料,而是很清楚地在跟你說:
「我知道整個問題有多大,所以我先把它壓到一個不會把數學炸掉的版本。」
更有趣的是,他們並沒有因為簡化,就把軟體機器人「變硬」。
相反地,他們刻意保留了那種軟綿綿、會順著環境走的自然柔順性,再想辦法讓傳統控制理論「學會怎麼跟它相處」。
這不是退縮,比較像是研究裡的一種高級自制力:
👉 先站穩,再談遠方。
反過來看,這三篇其實在教你同一件事
如果把這三個坑反過來看,其實就是一條很清楚的研究路線:
1️⃣ 先界定你要處理的是哪一種「動態」
不是全部,而是其中一小塊。
2️⃣ 模型是為控制服務的,不是為了逼真而存在
能算、能分析、能回饋,比像不像更重要。
3️⃣ 先做出一個「站得住」的版本,再談擴展
研究不是一次性地鎖定最終 Boss。
給研究生的那句話
如果你現在在 soft robotics 或 任何新興主題 的文獻裡載浮載沉,請記得這件事:
真正厲害的研究,從來不是一次解完所有問題,而是知道自己現在該避開哪一個坑。
這三篇文章,不是在告訴你怎麼變強,而是在幫你少被送回新手村幾次。
對研究生來說,這樣就夠了。
【參考文獻】
- Duriez, C., Bieze, T. M., Escande, A., Kheddar, A., & Marchal, D. (2021). Soft robots modeling: A structured overview. IEEE Transactions on Robotics, 37(3), 852–870.
- Thieffry, M., Marchal, D., & Duriez, C. (2022). Model-based control of soft robots: A survey of the state of the art and open challenges. IEEE Robotics & Automation Magazine, 29(3), 90–105.
- Della Santina, C., Katzschmann, R. K., Bicchi, A., & Rus, D. (2020). Model-based dynamic feedback control of a planar soft robot: Trajectory tracking and interaction with the environment. The International Journal of Robotics Research, 39(4), 490–513.
推廣組 柯文仁 / 本文搭配ChatGPT進行寫作輔助。